





So, this is basically the only post on here that is coming real time. What I mean by that is all the other posts are going to describe my progress in the project in a past tense. This is because I have a deadline (May 21) on which I have to present, so at the […]
Building a hot-wire foam cutter
This post is coming out of order. I actually built this before building the first prototype, but here it is… If you’ve ever tried cutting styrofoam with a knife, you’ll probably know it doesn’t really work. Your best bet is to find a really sharp box cutter and hope for the best. This might work […]
Building the first prototype
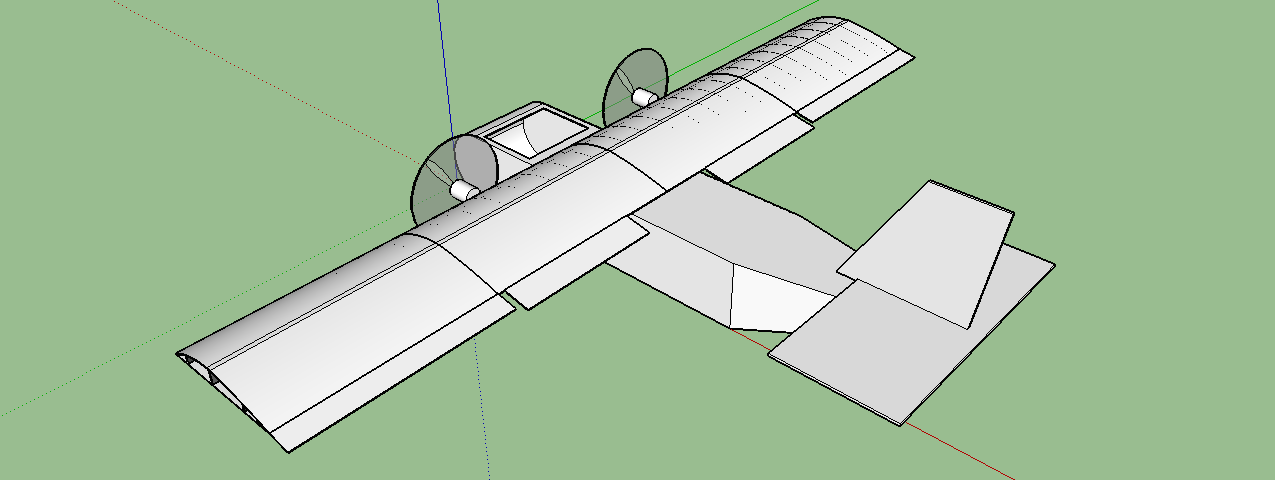
Before I go into the build, I have decided to call this prototype ARV MK1. ARV is for Autonomous Return Vehicle. Here’s what I made: I started by making a rough CAD sketch of the airframe. This helps me visualise the general dimensions before I start cutting up my expensive foam. In order to cut […]
Playing with Foam
Throughout history, airplanes have been built out of many materials. Early planes were constructed of wood and canvas, and then metal and aluminum. In recent years, composite materials like fiberglass and carbon fiber have become increasingly common. Model airplanes builders employ yet another material in their construction: foam. Rigid foams are a favorite for model aircraft […]
The Challenges
This is a fairly ambitious project, and there will be many challenges to face and solutions to find. Here is a document where I am linking pages that I find useful during my research. In order to guide my preparation, I’m going to try to predict some the issues I will have to tackle. These are […]
The Proposal
Welcome to my first post! I don’t have much yet, but here’s an excerpt from the proposal I submitted for my project. This was submitted to the Newton North High School Program which allows high school students to pursue an independent research project for the last few months of their senior year. Hopefully it will […]